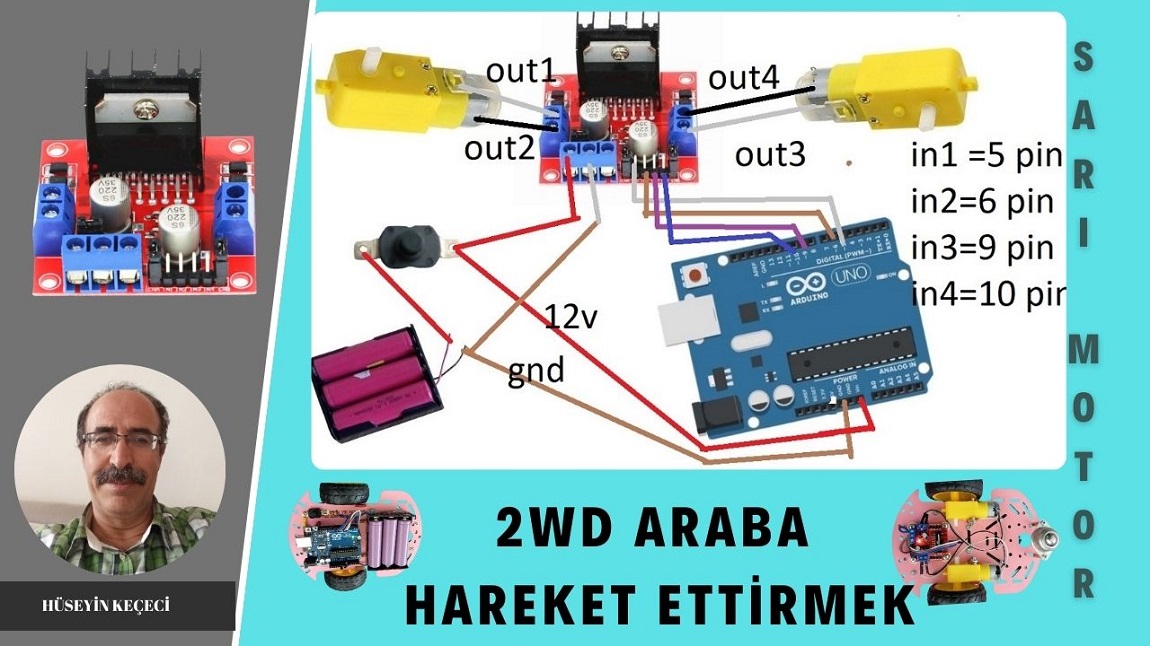
const int in1 = 5; //in1
const int in2 = 6; //in2
const int in3 = 9 ; // in3
const int in4 = 10 ; //in4
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
analogWrite(in1, 255);
analogWrite(in2, 0);
analogWrite(in3, 0);
analogWrite(in4, 0);
}
|
Arabayı oluşturduktan sonra soldaki yazılımı yükleyiniz
analogwriter önündeki 255 yazısı tekeri döndüren degerdir
bu deger 0 ile 255 arasında olur
örnek sag teker ileri dönüyorsa in1 yerine sagileri yazınız
aynı şekilkde in1 in2 in3 in4 leri değiştiriniz tekerlerin dönme yönüne göre
sagileri saggeri solileri sol geri gibi |
******************************************************************
Harkete Örnek komutlar araba ileri geri gider oldugu yerde saga sola döner
***********************************************************************
const int sagileri = 5; //in1
const int saggeri = 6; //in2
const int solgeri = 9 ; // in3
const int solileri = 10 ; //in4
void setup() {
pinMode(sagileri, OUTPUT);
pinMode(saggeri, OUTPUT);
pinMode(solgeri, OUTPUT);
pinMode(solileri, OUTPUT);
}
void loop() {
// durmak için
analogWrite(sagileri, 0);
analogWrite(saggeri, 0);
analogWrite(solgeri, 0);
analogWrite(solileri, 0);
delay (3000);
// ileri için
analogWrite(sagileri, 100);
analogWrite(saggeri, 0);
analogWrite(solileri, 100);
analogWrite(solgeri, 0);
delay (3000);
// geri için
analogWrite(sagileri, 0);
analogWrite(saggeri, 100);
analogWrite(solileri, 0);
analogWrite(solgeri, 100);
delay (3000);
// saga dön için
analogWrite(sagileri, 0);
analogWrite(saggeri, 100);
analogWrite(solileri, 255);
analogWrite(solgeri, 0);
delay (3000);
// sola dön için
analogWrite(sagileri, 255);
analogWrite(saggeri, 0);
analogWrite(solileri, 0);
analogWrite(solgeri, 100);
delay (3000);
} |
arabayı ileri götürmek için ileri değerleri 255 olurken geri degerleri sıfır olacak
255 degeri en hızlı demektir yavaşlatmak için 100 kullanabilirisniz
aşağıdaki komutlar ileri arabayı ileri götürür.
analogWrite(sagileri, 100);
analogWrite(saggeri, 0);
analogWrite(solileri, 100);
analogWrite(solgeri, 0);
bunun terside geri
analogWrite(sagileri, 0);
analogWrite(saggeri, 100);
analogWrite(solileri, 0);
analogWrite(solgeri, 100);
videoyu izleyebilirsiniz.
|