******** led.h ******** dosyasına yazılacak kodlar
// https://robotikhoca.com/
// https://www.youtube.com/channel/UCfTteFFi15p921GWXqziG5w
// bu kütüphane eğitim amaçlı yapılmıştır. led yakıp söndürmek amaclı kütüphanedir.
#ifndef ButonileLedyak_h
#define ButonileLedYak_h
#include "Arduino.h"
class ButonileLedyak{
public:
int leddurum=0;
int butondurum;
ButonileLedyak();
void butonileLedyak(int butonPin, int ledPin, int durum);
};
#endif
|
********** led.cpp ******** dosyasına yazılacak kodlar**
// https://robotikhoca.com/
// https://www.youtube.com/channel/UCfTteFFi15p921GWXqziG5w
// bu kütüphane eğitim amaçlı yapılmıştır. led yakıp söndürmek amaclı kütüphanedir.
#include "Arduino.h"
#include "ButonileLedyak.h"
ButonileLedyak::ButonileLedyak()
{
}
void ButonileLedyak::butonileLedyak(int butonPin, int ledPin, int durum)
{
//***********************************
if (durum==1){
pinMode(ledPin,OUTPUT);
pinMode(butonPin,INPUT);
int buton_bas=digitalRead(butonPin);
if ( buton_bas == HIGH) {
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
}
//****************************
if (durum==2){
pinMode(ledPin,OUTPUT);
pinMode(butonPin,INPUT);
int butondurum=digitalRead(butonPin);
if ( butondurum==1 and leddurum==0 ){
while (butondurum==1){
butondurum=digitalRead(butonPin);
}
digitalWrite (ledPin,1);
leddurum=1;
}
if (butondurum==1 and leddurum==1){
while (butondurum==1){
butondurum=digitalRead(butonPin);
}
digitalWrite (ledPin,0);
leddurum=0;
}
}
//*******************************
if (durum==3){
pinMode(ledPin,OUTPUT);
pinMode(butonPin,INPUT);
int buton_bas=digitalRead(butonPin);
if ( buton_bas == HIGH) {
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
delay(500);
} else {
digitalWrite(ledPin, LOW);
}
}
//****************************
if (durum==4){
pinMode(ledPin,OUTPUT);
pinMode(butonPin,INPUT);
int butondurum=digitalRead(butonPin);
if ( butondurum==1 and leddurum==0 ){
while (butondurum==1){
butondurum=digitalRead(butonPin);
}
digitalWrite (ledPin,1);
delay(500);
leddurum=1;
}
if (butondurum==1 and leddurum==1){
while (butondurum==1){
butondurum=digitalRead(butonPin);
}
digitalWrite (ledPin,0);
leddurum=0;
}
if (butondurum==0 and leddurum==1){
digitalWrite (ledPin,1);
delay(500);
digitalWrite (ledPin,0);
delay(500);
}
}
}
|
// https://robotikhoca.com/
// https://www.youtube.com/channel/UCfTteFFi15p921GWXqziG5w
// bu kütüphane eğitim amaçlı yapılmıştır. led yakıp söndürmek amaclı kütüphanedir.
#include <ButonileLedyak.h>
ButonileLedyak kececi;
void setup() {
}
void loop() {
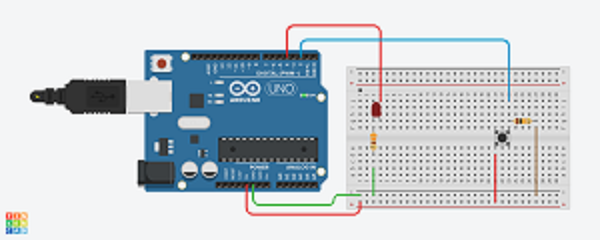
// parametreler (butonPin, LedPin, Durum(1,2,3,4))
kececi.butonileLedyak(2,4,1);
} |
sol tarafta bulunan kececi.butonileLedyak(2,4,1)
sol tarafta bulunan kececi.butonileLedyak(2,4,2)
sol tarafta bulunan kececi.butonileLedyak(2,4,3)
sol tarafta bulunan kececi.butonileLedyak(2,4,4)
burdaki ;
1 sayısı : butona basılı tutulunca led yanar
2 sayıdı : butona basıp elini çekince led yanar
3 sayısı : butona basılı tutulunca led yanar söner
4 sayıdı : butona basıp elini çekince led yanar söner |